
# 决策树
(Decision Tree)
一种对实例进行分类的树形结构,通过多层判断区分目标所属类别
本质:通过多层判断,从训练数据集中归纳出一组分类规则
优点:
- 计算量小,运算速度快
- 易于理解,可清晰查看各属性的重要性
缺点:
- 忽略属性间的相关性
- 样本类别分布不均匀时容易影响模型表现
# 求解方法
问题核心:属性选择(每一个节点,应该选用哪个属性)
信息熵:
熵是衡量数据集纯度的一个指标(也是度量不确定性的指标)。
对于一个类别变量 C 的数据集 D, 其熵定义为:
其中, 是类别 C 的个数, 是类别 在数据集 D 中出现的概率。
纯度:
某次分类中,正确的被分类样本占所有样本的比率。
关键步骤:
- 属性选择:
在每个节点上,算法会选择一个最优属性作为分割标准。这一过程可以通过计算不同属性的信息增益(ID3)、信息增益比(C4.5)或基尼不纯度(CART)来进行。
-
信息增益:衡量属性 A 对数据集 D 划分后信息熵减少的程度,表示为:
其中, 是属性 的不同取值个数, 表示在属性 上取值为 时数据集 的子集, 和 分别表示子集和总数据集的样本数量。 -
信息增益比:信息增益与属性固有值的熵之比(因为 ID3 偏向于选择具有较多属性值的属性,可能导致过拟合)。
其中, 为属性 A 的固有值(该属性在数据集中包含的信息量)。 -
基尼不纯度:数据集中随机抽取两个样本,它们属于不同类别的概率。
其中, 是样本属于第 类别的概率。
-
分割数据集:
根据所选属性的最佳分割点将当前节点下的样本划分为若干子集,并为每个子集生成新的分支节点。 -
递归建树:
对于每个新生成的子集节点,重复上述属性选择和分割的过程,直至达到停止条件(如所有样本属于同一类、没有剩余属性可分割或者达到预设的最大深度等)。 -
停止条件:
叶节点的最少样本数量 / 最大树深 / 叶节点的最大纯度
(这会导致某个叶节点中包含多类别的样本:取数量更多的作为叶节点的类别;若并列则随机选一个) -
剪枝处理:
决策树容易过拟合,为了提高泛化能力,通常需要对生成的树进行剪枝操作,移除那些可能带来过拟合影响的复杂分支。
降低错误剪枝 REP / 悲观错误剪枝 PEP / 基于错误剪枝 EBP / 代价 - 复杂度剪枝 CCP / 最小错误剪枝 MEP -
预测阶段:
构建完成的决策树可以用来预测未知数据的类别或连续值,只需将新数据沿树的路径向下传递,直到到达叶节点,该叶节点对应的类别或数值即为预测结果。
# ID3
-
选择划分依据:
对于数据集 D 中的每一个属性 A, 计算其信息增益,并从中选择具有最大信息增益的属性作为当前节点的分割依据。 -
生成分支节点:
根据所选的最佳属性及其各个可能取值,将数据集划分为多个子集。并为每个子集创建新的分支节点。 -
生成叶节点:
当不能进一步划分时,以该节点下的实例最多的类别作为叶节点的类别标记。
# C4.5
- 选择划分依据:
信息增益率偏好可取值较少的属性 (分母越小,整体越大),因此 C4.5 不是直接选取增益率最大的属性,而是使用一个启发式方法:
先从候选划分属性中找到信息增益高于平均值的属性,再从中选择增益率最高的。 - 处理连续属性:
(ID3 只能处理离散属性,C4.5 引入了一种将连续属性离散化的方法)
假设 n 个样本的连续属性 A 有 m 个取值。先将其排序,并取相邻两样本值的中位点作为候选划分点(共 m-1 个),分别计算以候选划分点作为二元分类点(属性 A 上大于 / 不大于划分点的样本集合)时的信息增益,选择信息增益最大的点作为连续属性 A 的二元离散分类点 - 缺失值处理:
(核心思想:降低缺失值所在样本的权重)- 如何计算信息增益率?
无视缺失值,先计算剩余样本的信息增益,然后乘以 无缺失值样本所占比例。 - 如果选择包含缺失值的属性作为节点,缺失值所在样本应该如何划分到子分支?
缺失值所在样本按照 无缺失值样本在每个子分支中所占的比例,划分到所有分支中。
- 如何计算信息增益率?
# CART
- 既能处理分类问题,也能处理回归问题
- 选择划分依据:
划分依据为某个属性是否等于某个取值。
计算每个属性每种取值条件下的基尼不纯度 ,其中 表示数据集中属性 取值 下的数据子集,
选取基尼不纯度最小的取值作为节点的划分依据。 - CART 生成的决策树是二叉树,每个非叶子节点有且仅有两个子节点。
对于数据集 ,个数为 ,根据属性 是否取某一可能值 ,把数据集 分成两部分 和 ,分别表示 取 / 不取 。
# 异常检测
(Anomaly Detection)
根据输入的数据,对不符合预期模式的数据进行识别。
异常检测 => 寻找异常点 => 寻找概率密度值较小的点
概率密度:
- 用于表示连续型随机变量的概率分布
- 概率密度函数 是一个描述随机变量在某个确定的取值点 附近的可能性的函数
- 区间 的概率为
从 到 的概率密度函数的积分是 1。
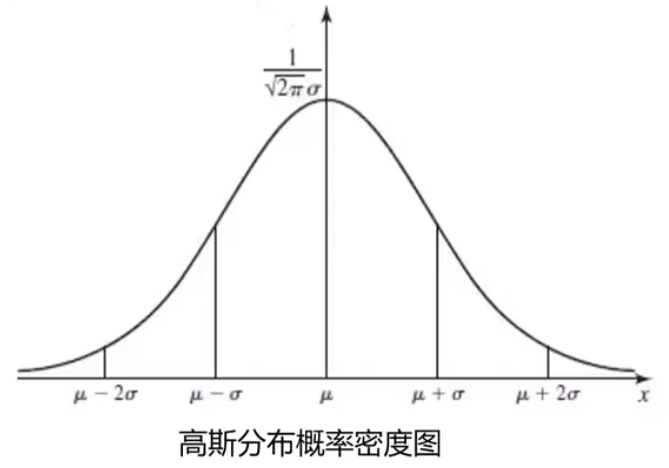
高斯分布
高斯分布的概率密度函数是:
其中, 为数据均值, 为标准差(大 / 小 => 数据分布离散 / 集中):
;
基于高斯分布实现异常检测
数据是一维的情况:(简单理解)
有一维数据:$$\begin {Bmatrix} x_1,x_2,\dots,x_m\end {Bmatrix}$$;共 个数据样本
-
计算数据的均值 ,标准差
-
计算对应的高斯分布概率密度函数
-
根据数据的概率密度值,进行判断:
如果 :则 为异常点
数据是高维的情况:
有高维数据:$$\beginBmatrix}x_1,x_1^(2)},\dots, x_1\\dots\x_n{(1)},x_n^{(2)},\dots,x_n\end {Bmatrix}$$;共 维,每维有 个数据样本。
-
计算每个维度的数据均值 ,标准差
\begin{array} &\mu_j={\frac{1}{m}\sum_{i=1}^mx_j^{(i)}},&&&\sigma_{j}^{2}=\frac{1}{m}\sum_{i=1}^{m}(x_{j}^{(i)}-\mu_{j})^{2}& \end{array} -
计算概率密度函数 :
分别计算每个维度下的高斯分布概率密度函数, 然后将结果相乘 -
判断 ?
# 主成分分析
(PCA) => 降维 => 高维向低维做投影
目标:投影后,不同类别的数据之间 关联度 尽可能小
=> 数据的方差最大(因为方差越大,数据越分散)
计算过程:
- 原始数据预处理:
(标准化:) - 计算协方差矩阵的特征向量、及数据在各特征向量投影后的方差
- 根据需求(任务指定 或 方差比例)确定降维维度 k
- 选取 k 维特征向量,计算数据在其形成空间的投影